|
|
|
发表于 2021-7-1 21:53
|
显示全部楼层
| ||
|
发表于 2021-7-2 17:36
|
显示全部楼层
| ||
|
发表于 2021-7-2 19:58
|
显示全部楼层
| ||
|
发表于 2021-7-2 20:50
|
显示全部楼层
| ||
|
发表于 2021-7-3 16:57
|
显示全部楼层
| ||
|
发表于 2021-7-3 18:54
|
显示全部楼层
| ||
|
发表于 2021-7-3 20:08
|
显示全部楼层
| ||
 canbus与vcu相连接,出现bus-off状态
canbus与vcu相连接,出现bus-off状态 有线连接失败
有线连接失败 Apex 串口通讯
Apex 串口通讯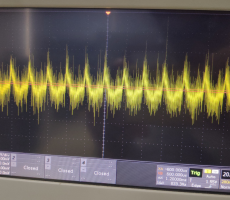 关于SPI通信问题咨询
关于SPI通信问题咨询 MIIVII APEX DUAL ORIN米文域控制器产品合
MIIVII APEX DUAL ORIN米文域控制器产品合



共 7 个关于本帖的回复 最后回复于 2021-7-3 20:08